
The VTS team is very pleased to announce that VTS 3.6 “Rendezvous” has just been released and is available for download at https://timeloop.fr/vts/download.

What’s new ?
Relative coordinates
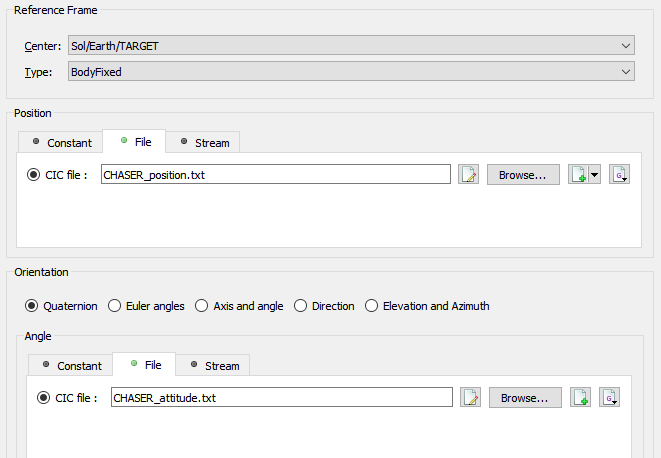
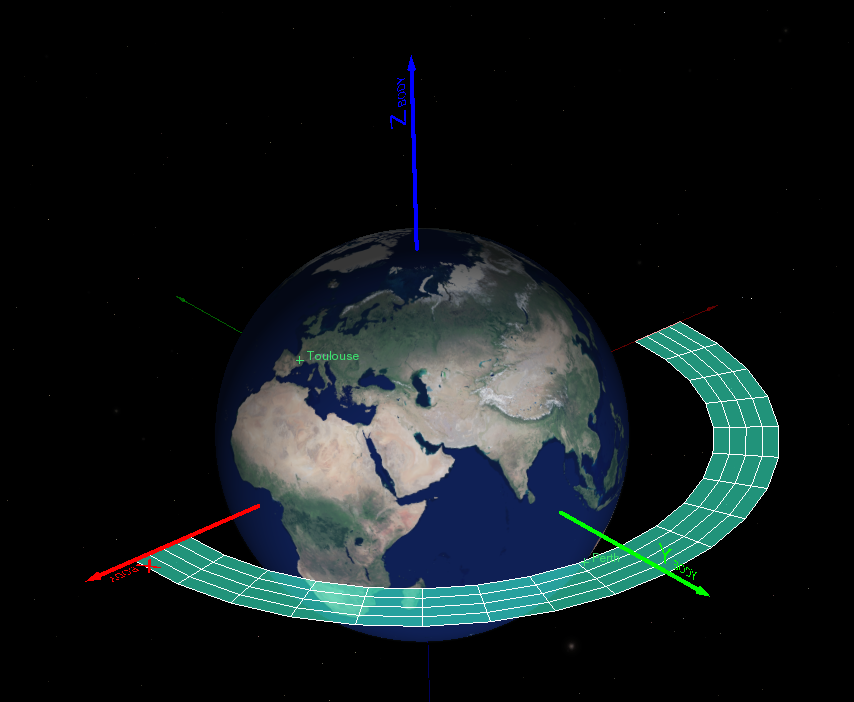
It is now possible to specify a reference frame to define the position and attitude of a satellite. By default, the reference frame center is the satellite parent body, but it can be changed to another satellite. The available reference frame types are : EME2000, Body fixed, TNW and QSW. Position and attitude are defined in the same reference frame.
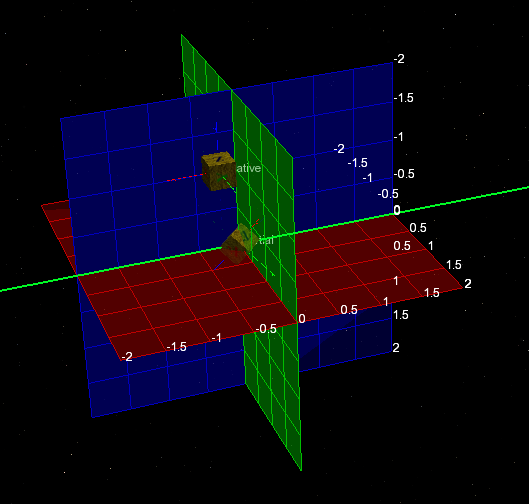
A chaser satellite defined with absolute coordinates (blue), and the same satellite defined with relative coordinates (pink)
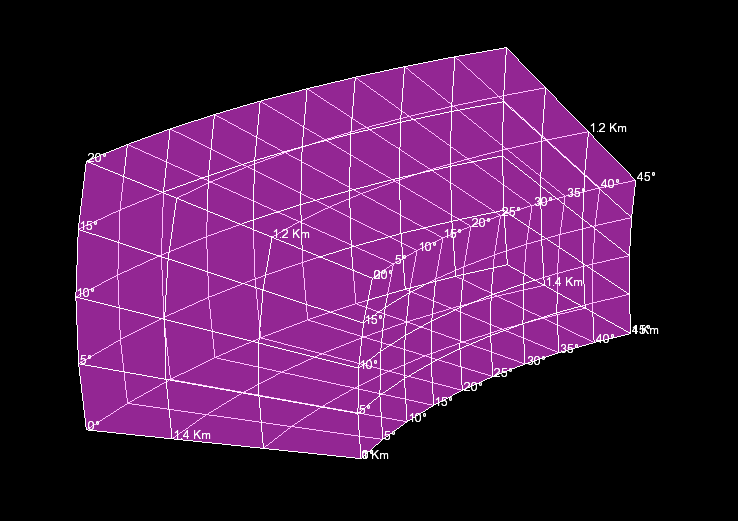
Visualizers
New graphical objects can be added to a satellite (only, for the moment) to visualize the orbits in a more visual context. Currently the available visualizers are ellipsoids, grids and spherical shell.
Much more !
- Support for CIC data exchange protocol version V3.0
- New “Tracking Shot” mode to define custom camera travelling animations
- Cascade layout in the Window Geometry Manager
To see the complete list of features, improvements and bugfixes included in VTS 3.6 please read the full changelog.
Contact us !
As always we are interested in your feedback to keep improving VTS.
Take a look at our contact page to send us any comment, suggestion or question you might have.